Robotics
Inside Job: How Sensiworm’s Intricate Access Capabilities Could Help Keep More Engines On-Wing





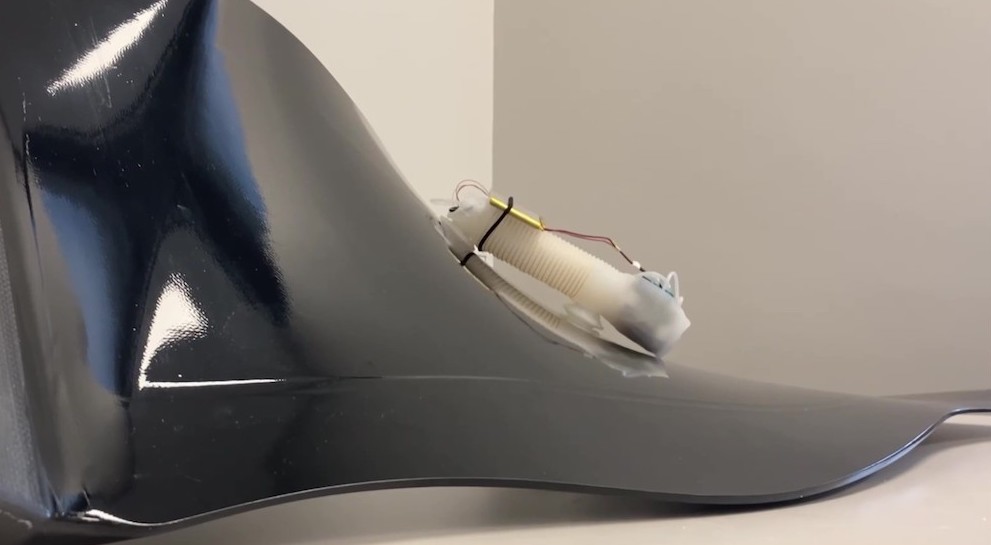
Moving deep inside the bowels of a jet engine — negotiating baroque curves and tricky surfaces — GE Aerospace Research’s new Sensiworm looks less like a complex triumph of engineering than something eerily close to a living organism. This is not a coincidence. Building on their literally groundbreaking Pipe-worm, the Aerospace Research Robotics team’s new Sensiworm (short for Soft ElectroNics Skin-Innervated robot worm) brings the strength and autonomy of those pneumatically controlled, earthworm-inspired “soft robots” to an inches-long device that can act as eyes, ears, nostrils, and fingertips for aerospace service operators.
“The traditional tools for this kind of inspection would be borescopes,” says Deepak Trivedi, principal robotics engineer for GE Aerospace Research, who has been working on GE’s soft-robotic technology for several years. “Since devices like that are tethered, you have to push them through a system like feeding a wet noodle through some plumbing.” By leveraging novel forms of locomotion, the Sensiworm propels itself — gripping surfaces, exploring environments, and mapping out internal networks. Ultimately, this could help achieve an array of inspections and repairs on-wing, potentially increasing engine time on wing and enabling faster turnaround times during engine maintenance.
As its name suggests, the Sensiworm is also designed with its own highly responsive sensing modalities. “It has electronic skin that can feel when it’s being touched,” says Trivedi. “It can feel the surfaces it moves along and detect defects during inspection or for repair.”
How is it able to do this? Trivedi credits the “stretchable electronics” GE Aerospace developed with funding and support from SEMI Flex Tech, an industry-led public-private partnership focused on advancing innovations in hybrid electronics, as well as the U.S. Army Research Lab. The company also partnered with the Electronics Engineering Center at Binghamton University and UES Inc., an Ohio-based R&D organization that works with commercial and military partners on advanced technologies.
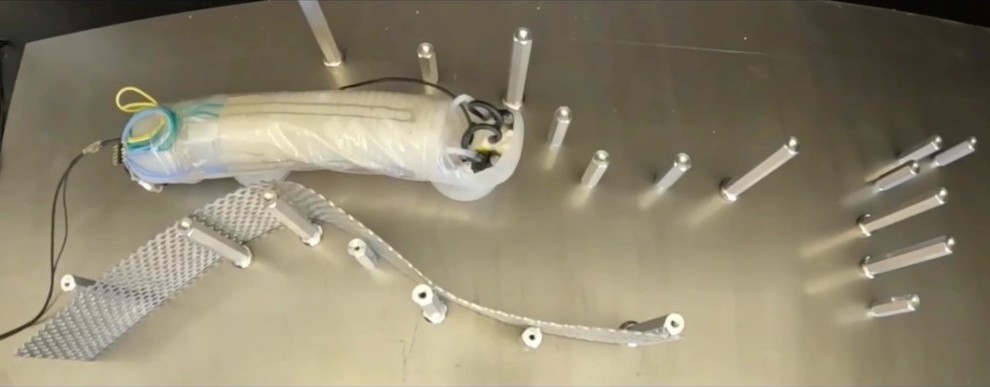
The Sensiworm is sheathed in a stretchable electronic skin printed with a kind of springy, highly conductive polymer. “The robot’s camera is connected with stretchable circuits, and its electronic skin is itself a multi-parameter resonance sensor,” Trivedi says. “That means it can do many things at the same time: transmit a video feed, navigate its surroundings, and tune in to different frequencies. So it can look for coating issues, damaged parts, transmitting power or signal, providing the real-time data that operators typically check.”
Not even noninvasive surgery has technology quite like the Sensiworm, which must overcome a unique set of challenges. First, it must navigate the unforgiving interior of a jet engine, which has “very tiny openings, a complex and confined interior you have to traverse through convoluted, often upside-down paths,” Trivedi says. Second, it must retain its own bodily impermanence. “‘First do no harm’ was a very significant mantra for us,” Trivedi says. “Soft-robotic prototypes have no rigid or hard parts. So even if it gets stuck or broken inside, it presents minimal risk when you turn on the engine.”
Aerospace servicing justifies investments like soft robotics due to their potential high value; streamlining the existing process can save millions of dollars. Right now, a maintenance team must manually operate a borescope, but they are limited in their ability to inspect hard-to-reach parts. “Instead, we should be able to program a Sensiworm to reach such a part, walk around it, examine it, and move on to the next,” Trivedi says. “In this way we’ll be able to automate that part of the inspection.”
In fact, Sensiworm is envisioned not only to enable on-wing inspections but to eventually execute repairs. Trivedi sees a future scenario in which the device doesn’t just detect an area where, say, thermal coating is missing — currently driving accelerated degradation of engine parts — but actually deposits or secretes a new coating, thus executing the repair itself.
“That’s something we’ve been looking into,” says Trivedi, who is one of the very few pioneers in soft robotics. He took his first step into the field when his Penn State engineering adviser tasked him with developing an elephant trunk robot. “Back then, ‘soft robotics’ was not a term,” he recalls. “Now there are conferences on soft robots, and journals called Soft Robotics.” After spending his first six years at GE in other areas, you might say he’s come back to his roots.
Trivedi recalls a recent experience of watching the Sensiworm navigate by smell. After studying how actual earthworms navigate their environments, his team put a chemical sensor into one device and watched it make its way toward a chemical leak. “It acted even more … biologically than we’d expected,” he says. The robot worm bent left, then right, blindly sniffing out a path, until it came to the source of the gas leak they had introduced. “We were all impressed by how quickly it discovered it,” he says, chuckling. “It actually looked very creepy.”