
exoskeleton
Do You Even Lift, Bro? Hardiman Was GE's Muscular Take On The Human-Machine Interface




Hardiman started in 1965 as a joint Army-Navy project to build a powered exoskeleton that could “amplify” human strength by a factor of 25 — so hefting the maximum load of 1,500 pounds would feel to the wearer like lifting 60 pounds. The project sponsors wanted a machine that could move cargo or equipment. The exoskeleton, which itself weighted 1,500 pounds, was actually two suits – one internal “skeleton” attached to the operator and an external one that carried objects.
 GE’s Hardiman could lift 1,500 pounds. Image credit: Museum of Innovation and Science Schenectady
GE’s Hardiman could lift 1,500 pounds. Image credit: Museum of Innovation and Science SchenectadyIn the days before cyborgs became a part of the popular imagination, much less artificial intelligence, researchers focused on “man-augmentation” systems. Humans would provide the brains and machines the brawn. “Man and machine can be combined into an intimate, symbiotic unit that will perform essentially as one wedded system,” GE project engineer Ralph S. Mosher wrote in a newly unearthed 1968 presentation on Hardiman to the Society of Automotive Engineers.
The challenge was figuring out how human operators could, through a force-feedback mechanism, “feel” the objects the Hardiman touched.
Mosher wanted to avoid building a machine that would destroy everything it touched. A strong robot, or an exoskeleton wearing human, was likely to rip a door off its hinges rather than feel resistance on the knob and simply swing it open.
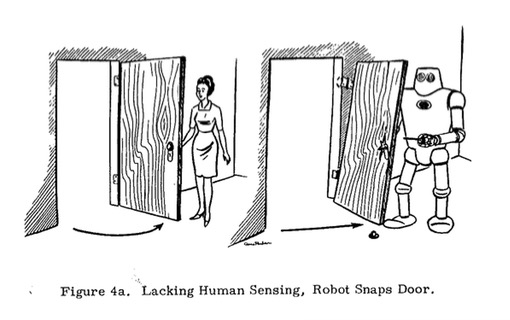 A robot snaps a door. From a presentation by GE engineer Ralph S. Mosher. Courtesy Museum of Innovation and Science
A robot snaps a door. From a presentation by GE engineer Ralph S. Mosher. Courtesy Museum of Innovation and ScienceThe robot, “given a chair to carry might pull it to pieces because of inability to sense or interpret the chair’s structure to being pulled apart,” Mosher wrote. Likewise, if it attempted to insert a rod into a snugly fitting tube, it would probably push too hard at the wrong angle and crumple the rod.
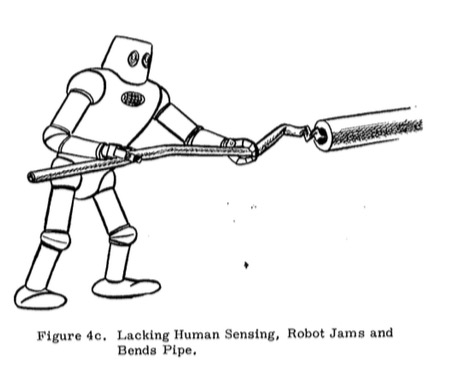 An illustration from a presentation by GE engineer Ralph S. Mosher. Courtesy Museum of Innovation and Science
An illustration from a presentation by GE engineer Ralph S. Mosher. Courtesy Museum of Innovation and ScienceThus, the Hardiman would need kinesthetic force feedback, so the operator could sense the environment. “It must be capable of detecting large or small changes of force and position, and transmitting this information accurately to the human operator,” Mosher wrote.
The complexity of the 30-joint exoskeletal system meant researchers had to develop entirely new control and feedback systems. They apparently accomplished this but their reports don't explain how.
Despite the engineering breakthroughs of the project, the exoskeleton itself never made it past the prototype stage because of its weight, lack of stability and power supply issues. Some unexplained bugs, such as what a 1971 report on the project described as “violent and uncontrollable motion by the machine” when both legs were activated, meant that the project was far from ready for rollout when it ended in August 1971. Hardiman's walking speed was 2.5 feet per second, or just under two miles per hour.
Hardiman ultimately rolled into other research projects on cargo and ordnance handling.
But others have taken up the challenge of the human-machine interface in wearable robotics, building exoskeletons that help people with disabilities or severe injuries walk again. Others are focusing on so-called soft robotics, which use advanced materials to give artificial movement to limbs.
Meanwhile, robotics companies have taken up the question of how a human skin can sense something that it isn’t touching directly. A new glove that allows people to “feel” objects created in virtual reality has just come on the market. There's been no word on whether the glove's wearer will inadvertently pull doors off their hinges.